
Riding on Electrons - The Altmann Tru-Torque Drive-Mode
This article contains information about the development of the Altmann AMM-P4 controller with selectable Tru-Torque Drive-Mode. The Altmann AMM-IMMOGNITION I & I controllers as well as the Altmann AMM-P3 are for V-twin combustion engines.
The Altmann AMM-P4 is aimed at electric motors, especially brushed permanent magnet DC motors.
Within the range of DC motors which are strong enough for propelling a motorcycle, the Lynch motor (named by inventor Cedric Lynch) sticks out of the crowd. It seems to have the highest power and also the highest efficiency. Lynch motors are made by LEMCO in England and AGNI in India.
Similar motors are made by Etek and Perm are a bit smaller and are used by Zero-motorcycles and others.
See below a Lynch motor made by LEMCO, taken from a Quantya electric motorcycle.
Some other manufactures such as Brammo and Mission employ brushless electric motors in their motorcycles. Brushless or multiphase motors have the advantage that their electrical commutation does not generate heat inside the motor, so the motor housing can be sealed against water and dust, while a brushed motor needs venting holes.
The electric commutation of brushless motor needs to control the 3 motor windings synchronous to the motor's rotation, so they need sensors for the motor position and they need three power stages (one for each winding) which makes the controller of a brushless motor more complex, larger, and more expensive compared to a controller for a brushed DC motor.
An all-electric motorcycle race recently took place on the Isle of Man: The TTXGP.
In this race team AGNI has won by a large margin, using 2 Agni motors, Kelly controllers and Kokam batteries. For me this is proof enough that Cedric Lynch's good old brushed DC motor is a perfect choice for an electric motorcycle.
Btw. Kokam cells are also used in the Quantya battery box.
The controller used by the excellent Quantya bikes is the AXE 4844, a quality piece made in USA by Alltrax.
The AXE 4844 (shown below) has the following ratings: 48V, 200A continuous, 400A 1 minute.

So what is the problem ?
That already looks very good, is the development of electric motorcycles already finished ?
Certainly not.
While there are many high quality controllers available, they all share one problem: They do not seem to be designed with motorcycles in mind.
Their control stategy - or - drive-mode - is not especially suited for a motorcycle.
The control stategy of virtually all controllers is such that the throttle position sets the output voltage, or more accurate: it directly sets the PWM duty cycle which is proportional to the output voltage.
Now you must understand the working principle of a DC motor. If you apply a voltage to a DC motor, it will do anything (pull as much current as possible) to reach the RPM which corresponds to the drive voltage.
This setup behaves like a very aggressive Tempo-Mat, or Speed-Control.
On a real motorcycle (or car), the throttle setting is equal to a force (a torque) and not a speed. That means that with a low gas setting, you can also accelerate to higher speed, it just takes a longer to get there.
On a speed controlled electric vehicle, in order to gently accelerate to a higher speed, you have slowly increase the throttle until you reach full throttle.
You cannot just pull a little throttle and wait until you reach speed, because you will never reach speed in a speed-control setting, unless you pull full throttle.
Because you have to pull so much throttle for any practical speed, the bike will just jerk back and forth and will be very annoying to ride.
That was my experience with the original Quantya bike.
It should be noted that the Quantya bikes are primarily designed for enduro, moto-cross and competition, so this brisk throttle response comes in handy, almost as a desired feature: When climbing a muddy hill, the speed mode of an electric bike can be very helpful, because if the rear wheel slips, it does not accelerate, it just keeps the speed, which definitely improves tracking and makes climbing easier - at least in the dirt.
However, on a normal road, for a rider with less competition in mind, this aggressive throttle response easily becomes an annoyance, because you just cannot ride smoothly. Also the necessity to for the throttle to follow the desired speed, just distracts you from riding the bike.
So what I wanted was a drive-mode, that would convert the throttle setting to a driving torque (force), not a speed, so that you still can use the full power of the motor, but you can control it much better. It is called "The Altmann tru-torque drive mode".
This was basically the idea that made me design my first electric controller. The second idea was, that when I would make a controller my-way, it would support both drive-modes: the Altmann thu-torque-mode and the common speed-mode as well, selectable by the flick of a switch. So that you can use, what suits your riding situation best.
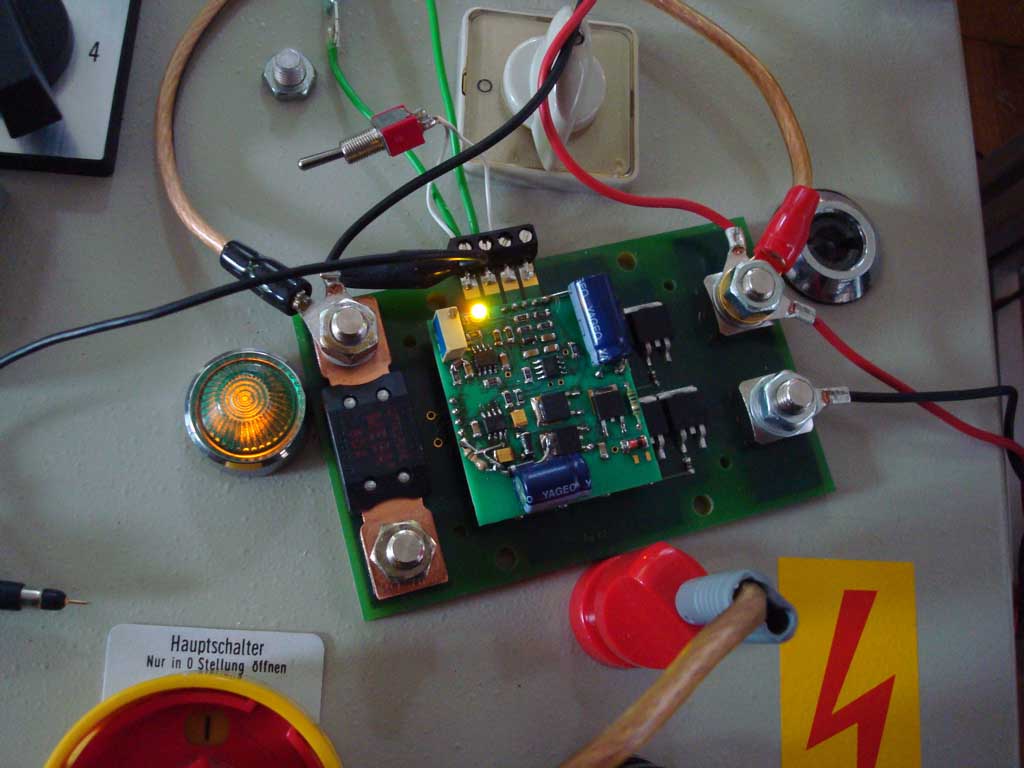
Whenever you start dealing with electric vehicles (especially motorcycles) you NEED a kill switch, one that will interrupt battery current !!
Kill switch (red) and drive-mode switch:

My bench setup for first functionality tests of the tru-torque drive mode:
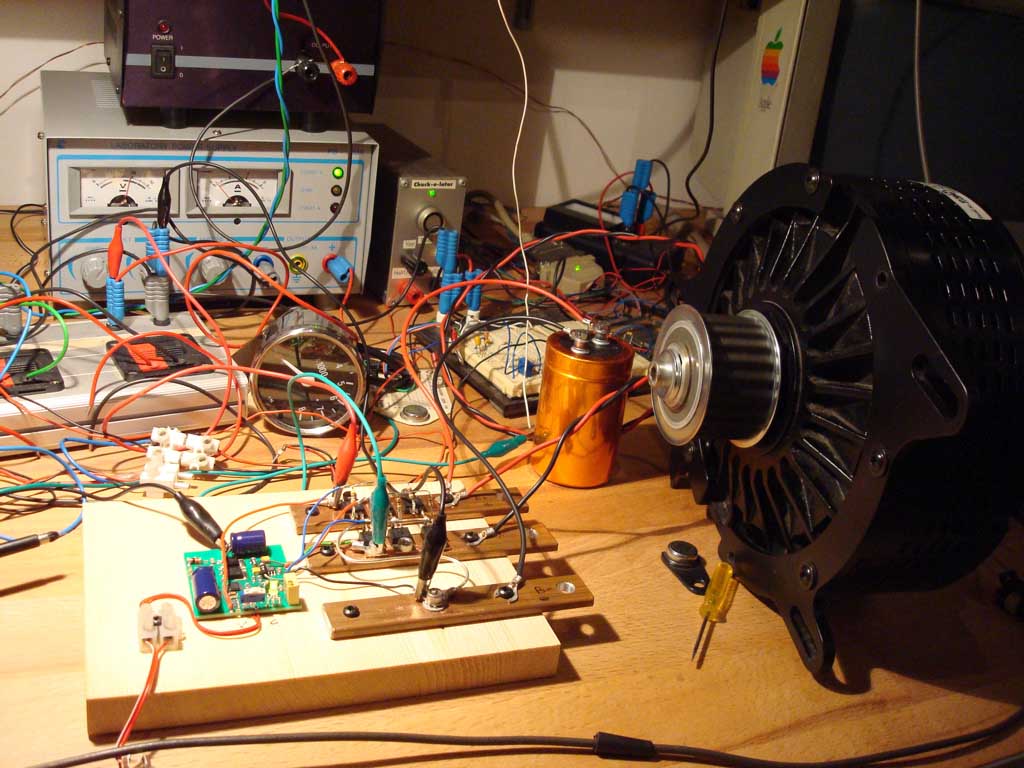
After the drive-modes and everything else was tested on the small scale, it needed to be tested on the larger scale.
Below specially contructed power-supply with security functions and switchable voltage (up to 100 V DC).

Common electric vehicle controllers are large and heavy.
I wanted something smaller, that makes use of todays MOSFET transistors and available technology.
I also wanted a solution which would be suited for automated component placement and soldering.
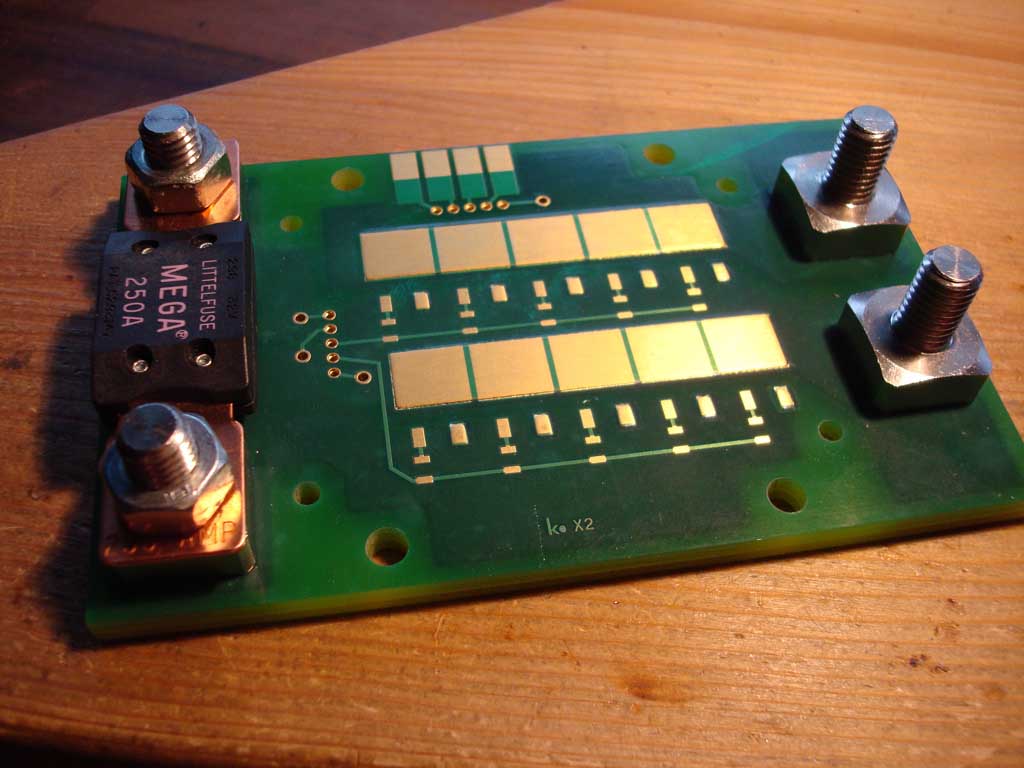
See below my High-Power, High-Current (400 Ampere) printed circuit board for SMD assembly.
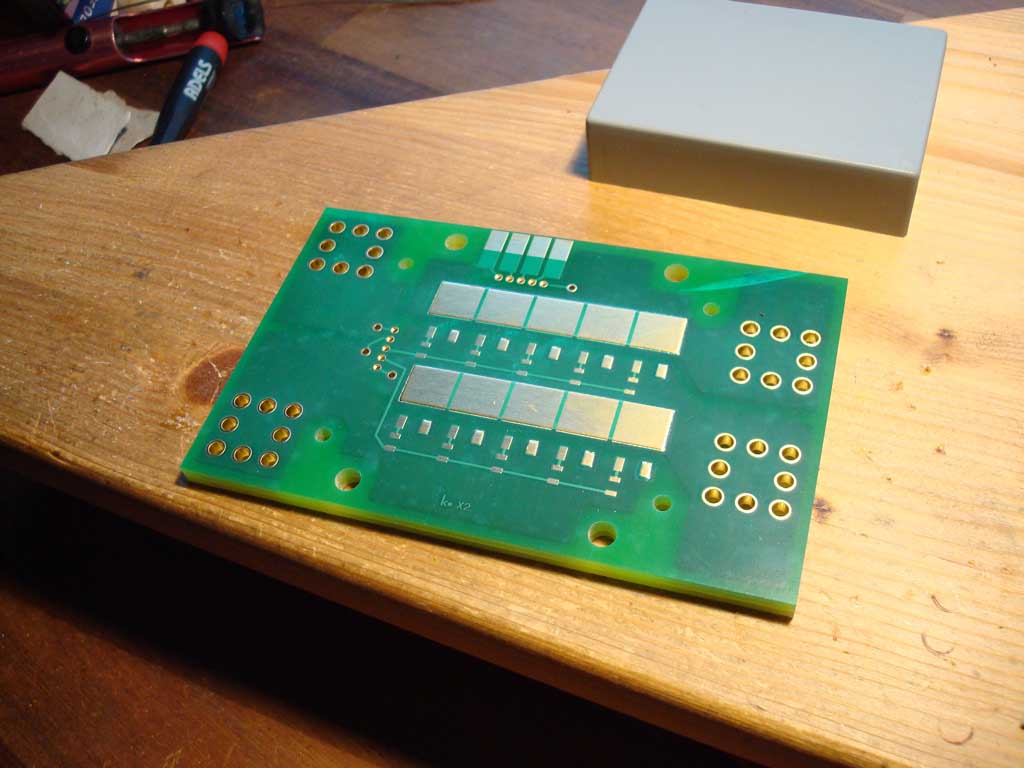
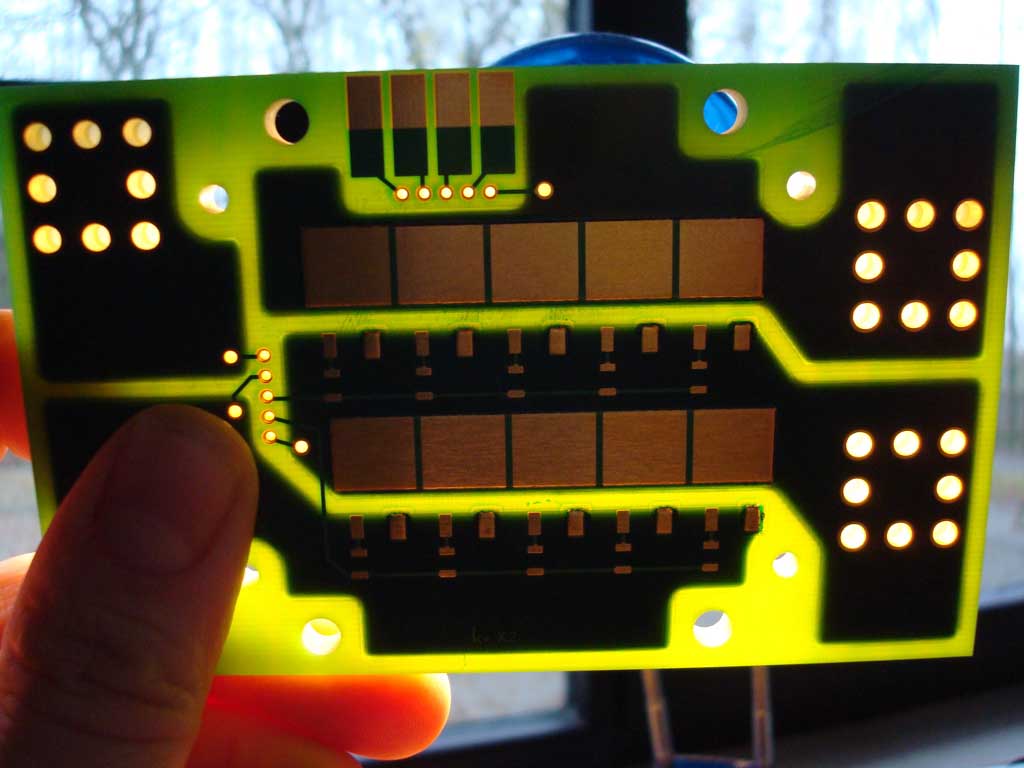
This High-Current PCB is constructed of several layers. The main current layer is 3-mm strong pure copper and has several vias to the top signal layer for the gate-drive, etc...
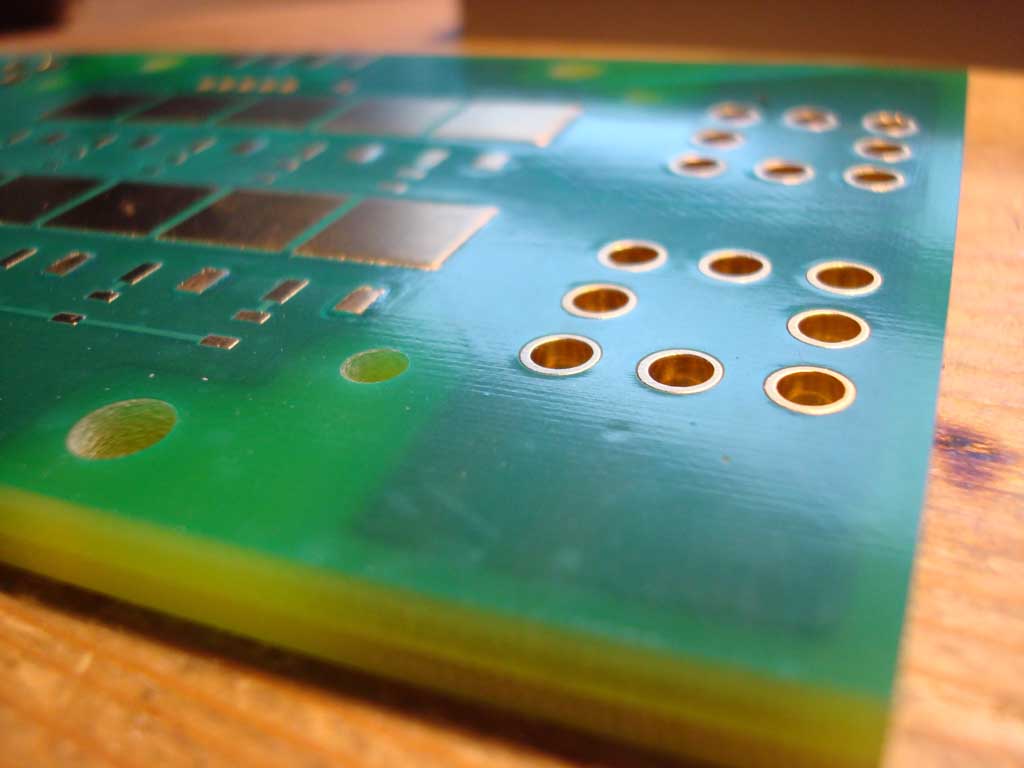
The SMD-pads for the MOSFET transistors are level to the pcb surface, all pads and holes are gold plated.
The holes on the right are for connectors which are inserted into the massive copper layer using a hydraulic press.
I've been searching the whole internet for suppliers of high-current pcbs, and it was very funny, that seemingly the only company in the world, which is able to make a high-current PCB like this one, is sitting in my home town 'Haan', only about 400 meters from our house.
They also have a funny name: Korsten & Goossens.
As you can imagine, Korsten and Goossens was very supportive and helpful in this project.
On the following pic, the massive main copper area of the high-current pcb becomes visible:
Here you see the the M-8 stud press-fit connectors inserted into the 3mm high current copper layer of the PCB.
The press-fit connectors are made by Broxing in Switzerland.
This was another co-incidence that kind of supported me, the Broxing sales rep is sitting less than 1 km from here, LOL :)
Korsten and Gossens is able to make the PCB in such a way, that you get a perfect press-fit connection, when using the Broxing connectors.
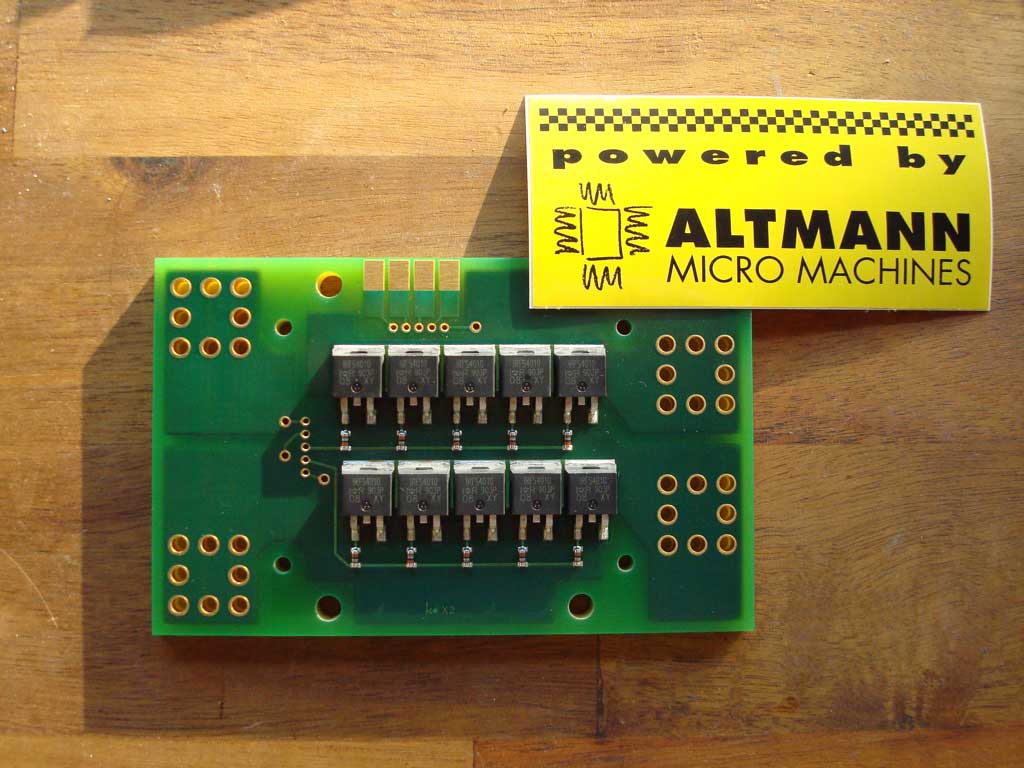
This is the high-current PCB after automated component placement and soldering, performed by Heinen Elektronik GmbH, also from my hometown Haan, yes we are some kind of mini-silicon-valley here in Germany :)
Since the P4 controller features the Altmann Tru-Torque Drive-Mode, it has to have in depth real-time knowledge of the current that is flowing through the motor.
The 250A MEGA-fuse, shown 2 pics above is used for measuring the current that is flowing through the motor, controller and back to the battery. The voltage drop that appears on the fuse, when current is flowing through it, is filtered, amplified in some precision opamp and filtered again before it enters a high-speed analog to digital converter running on 400 kHz sample rate.
The filter circuit is finely adjusted to the PWM speed, in order to provide accurate current measurement.
It should be noted that the P4 controller of course prevents the fuse to blow any time, however, in case things go really really wrong, it's good to have a fuse.
The PWM frequency that is controlled by a high-performance microcomputer is about 16kHz.
The software keeps track of the average (battery) current for each PWM period, as well as the impulse (motor) current, that is flowing during pulse-cycles as short as 2.5 µsec.
In Tru-torque-mode the current is precision regulated according to the throttle position. Current regulation happens 16-thousand times in one second, which is is even fast enough to smooth out mechanical unbalance inside the electric motor.
Shown below: test setup with power-supply, Lynch motor,
oscilloscope. Also note the Zilla screwdriver, a must have for any EV
designer. 
Here you see a closeup of the Altmann P4 controller.
Employing latest technology allows me to use a smaller number of electronic components than you would usually see in an electric controller.
Size comparison between ALLTRAX AXE 4844 and Altmann P4 ... and ... pencil.

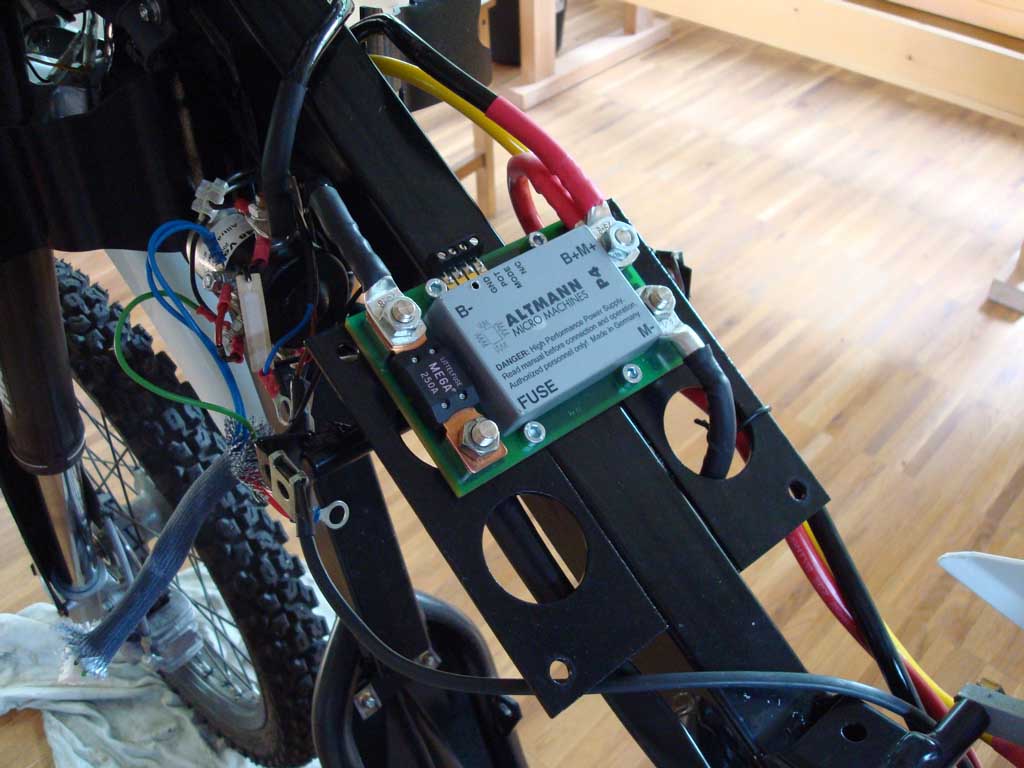
Mounting the Altmann P4 controller to the Quantya bike.
It somehow looks lost ... so much space is left for ... a charger ???
Close to first test-ride. 100V 10.000 µF main capacitor added:
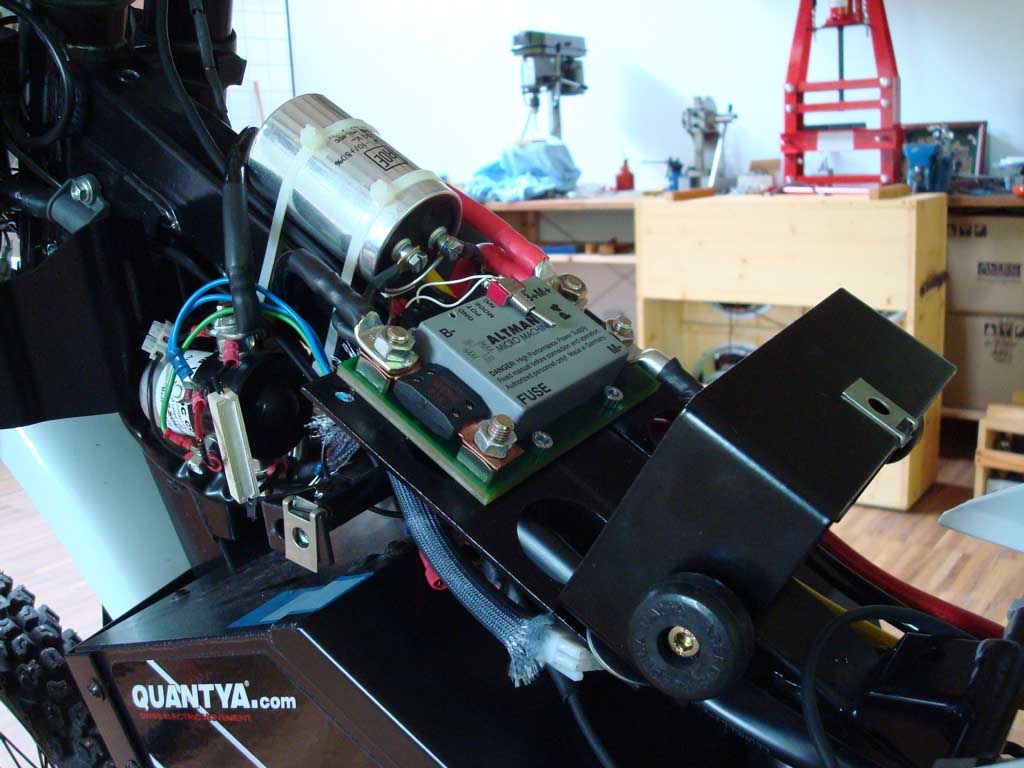
Switch for selecting between conventional speed-drive mode and Altmann Tru-Torque drive-mode:

First test ride: WOW
I knew I was up to something, but that it would be so great I could not imagine.
Riding the bike in Tru-Torque mode feels so intuitive, so natural, it is almost like flying.
Motor power is fully there, but with a smoothness and easy response, that there is nothing left to be desired.
With a flick of the mode switch you're back in speed control, which is good for creeping and some off-road.
Back to the road I switch to Tru-Torque.
So I have what ever I need and - when I need it - for every riding-situation.
Perfect :)
After test ride: two worlds meet:
left -> riding on salad oil
right -> riding on electrons.

Stay tuned for more ... Fun ...
ALTMANN MICRO MACHINES ... Dipl.-Ing. Charles Altmann ... Erlenstr. 15 ...42697 Solingen ...Germany
phone +49-212-233-7039 ... email